【哪吒开发板试用】+地下管廊智能巡检系统
 openlab_96bf3613
更新于 23天前
openlab_96bf3613
更新于 23天前
摘要 ABSTRACT
本项目开发了一款针对城市地下综合管廊设计的智能巡检系统,该系统整合了哪吒N97开发板的强大计算能力与多功能接口,集成了高精度传感、导航和路径规划技术。通过甲烷、温湿度、红外传感器及激光雷达等设备实现了环境的实时监测与自主导航功能。哪吒N97开发板作为系统的中枢,与下位机STM32高效协同,确保了数据处理与执行控制的无缝衔接。系统测试表明,该智能巡检系统在环境监控、高精度建图及智能避障等方面表现出色,验证了其在地下管廊巡检技术上的显著进步。此外,哪吒N97开发板的应用不仅提升了系统的智能化水平,还为智慧城市的建设提供了关键技术支撑,展示了其在未来城市基础设施维护中的广泛应用前景。
关键字:地下综合管廊,智能巡检系统,环境监测,自主导航,灵活避障,智慧城市
The project has developed an intelligent inspection system specifically designed for urban underground utility tunnels. This system integrates the powerful computing capabilities and versatile interfaces of the NaZha N97 development board, incorporating high-precision sensing, navigation, and path planning technologies. By utilizing methane, temperature and humidity, infrared sensors, and LiDAR, the system achieves real-time environmental monitoring and autonomous navigation. The NaZha N97 development board serves as the core of the system, effectively collaborating with the lower-level STM32 controller to ensure seamless processes from data processing to execution control. System testing has demonstrated that this intelligent inspection system excels across various application scenarios, notably in environmental monitoring, high-precision mapping, and intelligent obstacle avoidance, validating its significant advancements in underground tunnel inspection technology. Additionally, the integration of the NaZha N97 development board not only provides a solid foundation for the system's intelligence but also offers key technical support for **art city construction, demonstrating broad application prospects in the maintenance of future urban infrastructure.
Key words: Underground comprehensive pipe gallery, Intelligent inspection system, Environmental monitoring, Autonomous navigation, Agile obstacle avoidance, Smart city.
第一章 性能分析
1.1 处理器性能
哪吒开发板搭载的是英特尔® N97 处理器,这款处理器基于 Alder Lake-N 架构,采用四核设计,最高主频可达 3.60GHz。Alder Lake-N 架构引入了混合核心架构的概念,即高效核心和能效核心的组合,但在哪吒开发板中,我们看到的是四颗高效核心,这确保了单线程和多线程应用都能得到良好的性能表现。
N97 处理器的 12W TDP 表明它在功耗管理方面进行了优化,这意味着开发板可以在没有主动冷却的情况下运行,减少了噪音并提高了长期运行的稳定性。对于那些对功耗敏感的应用场景如移动设备或边缘计算,这一点尤为重要。
1.2 图形处理能力
集成的 Intel® UHD Graphics Gen12 是基于最新的 Xe 架构,它提供了多达 24 个执行单元(EU)。每个 EU 包括了多个矢量引擎和矩阵引擎,支持包括 INT8 在内的多种数据类型。这种 GPU 设计旨在提供高效的图形处理能力,尤其适用于轻量级的机器学习推理任务。
对于显示输出,HDMI 1.4b 接口支持 4K UHD(3840×2160)分辨率输出,尽管刷新率限制在 30Hz,但对于大多数数字标牌和多媒体应用来说已经足够。对于更高级别的图形处理需求,可能需要额外的图形加速解决方案。
1.3 内存与存储
哪吒开发板配备的是 8GB 双通道 LPDDR5 内存,相较于传统的 DDR4 或 LPDDR4,LPDDR5 提供了更高的带宽和更低的延迟,这对于提高系统的整体性能至关重要。8GB 的容量对于大多数现代操作系统和应用程序来说是充足的,可以确保流畅的多任务处理验。
存储方面,64GB 的 eMMC 存储空间提供了足够的空间来安装操作系统、应用程序和数据文件。虽然 eMMC 不如 SSD 快速,但对于开发板这样的设备来说,它提供了很好的性价比。
1.4 扩展性和连接性
哪吒开发板提供了丰富的 I/O 接口,包括 40 针 GPIO 扩展接口、USB 3.2 Gen 2 接口、HDMI 输出以及千兆以太网接口。GPIO 接口支持 PWM、UART、I2C、I2S、SPI 和 ADC,使得开发者可以根据自己的项目需求添加各种传感器和其他外设。
USB 3.2 Gen 2 接口提供了高速的数据传输速率,这对于连接高速存储设备或其他外设非常重要。而千兆以太网接口则确保了网络连接的高速度和稳定性,对于需要频繁访问网络资源的应用特别有用。
第二章 巡检机器人综合系统设计
下面将在 jetson nano 的项目移植到哪吒N97开发板,用来测评哪吒开发板的性能,文章将从智能巡检机器人的综合设计来综合体现哪吒开发板的性能。
2.1 综合系统架构
本智能巡检系统以无人巡检机器人为载体,搭载高灵敏度甲烷传感器、高性能红外温度传感器、耐用的温湿度传感器和全方位激光雷达,形成一个综合环境监测与自主导航解决方案。系统能够实时监测甲烷浓度、温湿度变化及管廊内管道的温度异常,有效预防安全隐患,同时利用激光雷达进行建图与自主导航,确保机器人在复杂环境中稳定运行。
2.1.1 核心功能与技术参数
(1)哪吒开发板:
哪吒(Nezha)开发套件以信用卡大小(85 x 56mm)的开发板-哪吒(Nezha)为核心,采用英特尔®处理器 N97(Alder Lake-N),结合了高性能和低功耗的特性。它支持四核 SoC,时钟频率高达 3.60GHz,TDP 仅为 12W。 其内置 GPU 用于 高分辨率显示。哪吒保持了 85mm x 56mm 信用卡大小的外形尺寸,与树莓派相同,包括高达 8GB 的 LPDDR5 系统内存、高达 64GB 的 eMMC 存储、板载 TPM 2.0、40 针 GPIO 连接器,并支持 Windows 和 Linux 操作系统。这些功能与无风扇冷却器相结合,为各种应用构建了高效的解决方案,适用于教育、物联网**、数字标牌和机器人等应用。
内置 Intel® UHD Graphics Gen12,最多 24 个执行单元,这也是一个强大的 AI 引擎,可用于 AI 推理。它是基于 Xe 架构的新一代 GPU。支持包括 INT8 在内的主要数据类型。通过HDMI 1.4b端口,它支持30Hz的4K UHD(3840×2160)以实现高分辨率显示。
(2)环境监测
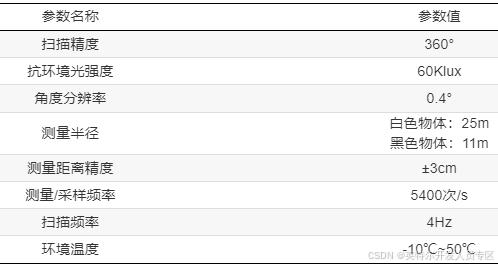
甲烷传感器:量程覆盖0%至100%,分辨率0.1%LEL,响应时间T90≤3s,确保甲烷泄漏预警的准确性与及时性。温湿度传感器:温度测量范围-40至120℃,湿度测量范围0至100%RH,测量精度高,适合地下恶劣环境。红外热成像仪:覆盖-40至300℃测温范围,确保对热异常的精确识别,预防过热或冷凝风险。激光雷达:实现360°扫描精度,抗强光干扰,测量距离精度±3cm,支持在无GPS环境下的自主导航。
(3)自主导航与智能避障
Kartor算法:不依赖里程计,利用高斯牛顿迭代优化激光雷达数据,结合回环检测机制,实现实时定位与建图[1]。TEB算法:结合长短期记忆网络(LSTM)与深度强化学习(TEB),实现对复杂动态环境的高效自主避障与路径规划[2]。
(4)环境监测
裂缝检测:通过训练YOLO模型识别特定类型的结构损伤,如混凝土裂缝或其他形式的损坏,可以及早发现结构问题,防止进一步恶化。积水检测:积水可能导致电气设备短路或其他安全隐患。YOLO模型可以通过识别水的特征,及时发现积水情况,并提醒管理人员进行排水处理。异物检测:管廊内部可能会出现各种异物,如工具、废弃物或其他不应该存在的物品。这些异物不仅会造成安全隐患,还可能阻碍巡检机器人的行进路线。YOLO模型能够识别这些异物,并帮助机器人绕过或标记它们的位置以便后续清理。
2.1.2 系统实施细节
本智能巡检系统基于ROS(Robot Operating System)框架,实现了软件的高度模块化与代码的复用性。系统采用了分布式架构,支持运动控制、KARTOR建图、路径规划等多个功能节点的协同工作。ROS提供的Rviz、Gazebo、ro**ag等工具极大提升了开发与测试效率。Kartor算法通过对激光雷达数据进行优化处理,并结合/TF树管理不同坐标系间的变换,实现了精确的自我定位与地图构建。通过使用map_server功能包保存所构建的地图,为路径规划提供了坚实的基础。TEB(Timed Elastic Band)路径规划器的集成则考虑到了机器人的动态约束,能够实时调整路径规划,确保导航既高效又灵活。TEB算法通过局部时间窗口内的动态优化,实现了对环境变化的即时响应,有效避免障碍物。
系统利用NB-IoT技术,实现了从机器人到运维终端的低延迟、高效率的数据传输,确保了环境监测数据的实时传输与报警通知。系统选用了哪吒N97开发板作为主控制器,该开发板基于英特尔®处理器N97,结合了高性能与低功耗特性,支持四核SoC,最高时钟频率达3.60GHz,TDP仅为12W,内置Intel® UHD Graphics Gen12 GPU,支持AI推理,为系统提供了强大的计算能力。下位机采用STM32微控制器,通过精密的控制算法如PID控制,驱动阿克曼转向机构,确保了车辆能够精确、平滑地遵循预定路径。此外,系统还加入了YOLOv5模型,用于特定物体检测,包括裂缝、积水及异物识别,进一步增强了系统的智能检测能力。。
2.2 功能与性能参数
本智能巡检系统集成了高灵敏度甲烷传感器、高性能红外温度传感器、耐用的温湿度传感器以及全方位激光雷达,共同构建了一套全面、高效的地下管廊环境监控解决方案。采用高灵敏度的甲烷传感器,能在-10至50°C下实时监测空气中甲烷浓度的变化并预警甲烷泄漏。温湿度传感器基于可靠的电阻式或电容式传感技术,专为应对地下空间的恶劣条件设计,追踪温湿度变化趋势,及时发现不利环境条件的早期迹象,确保设施耐久与安全。红外热成像传感器则覆盖-40至300°C范围,非接触式监控管廊内管道温度异常,预防过热或冷凝风险,有效预防管道损伤及性能下降。
2.2.1 自主导航
Kartor算法是一种无需依赖里程计信息的KARTOR技术,专门设计用于激光雷达数据处理,它在地下管廊场景中通过以下步骤实现环境感知与自我定位:首先,利用HOKUYO激光雷达采集环境点云数据;算法利用扫描匹配进行位姿估计,确保无纹理环境中的定位稳定;包含回环检测机制以修正累积误差,维持地图与定位一致性;最终,基于构建的栅格地图,结合全局与局部路径规划算法[4]。
2.2.2 智能避障
采用的TEB算法,巧妙融合了LSTM的记忆能力和TEB的决策优化优势,针对地下管廊复杂动态环境,实现了智能机器人的高效自主避障与路径规划[5]。LSTM单元处理时间序列数据,利用历史轨迹和环境变化信息,使机器人具备预测环境动态的能力;而TEB算法则确保策略的连续性与稳定性,指导机器人在追求最安全、高效的行进策略同时,灵活应对突发障碍,实时调整路径,从而在确保安全性的前提下,顺利完成巡检任务,彰显了该算法在复杂环境自主导航与智能避障领域的先进性和实用性。
2.2.3 实时监控
该系统利用新兴的窄带物联网(NB-IoT)技术,实现从机器人端到运维端的低延迟、高效率数据传输。NB-IoT以其覆盖广、功耗低、连接多的特点,即使在地下深处也能保证数据的连续、稳定传输,涵盖了环境监测的各类关键参数,如甲烷浓度、温湿度变化、激光雷达探测到的障碍物信息等。系统界面会动态展示传感器数据的最新变化,如温度、湿度的波动曲线,此外,系统还集成报警功能,一旦检测到参数超出预设阈值,将立即触发警报通知,确保能够迅速响应,采取相应措施,有效预防潜在的安全风险和设备故障,极大提升了地下综合管廊运维管理的效率与安全性。
2.2.4 特定物体检测
裂缝检测:YOLO模型经过专门训练,能够识别管廊墙壁或地面的裂缝。利用安装在巡检机器人上的高分辨率摄像头,实时捕捉管廊内部的图像,并由YOLO模型进行分析,即时检测到任何结构上的损伤。这一功能有助于提前发现并修复潜在的结构问题,避免更严重的安全隐患。积水检测:积水的存在可能导致电气设备故障或其他安全问题。YOLO模型能够通过识别积水的特征,如水面反射和轮廓,及时发现并标记积水区域。这为维护团队提供了及时的信息,以便采取排水措施,减少事故发生的可能性。异物检测:管廊内部可能会出现各种不应存在的物体,如工具、垃圾或其他障碍物。YOLO模型可以识别这些异物,并将其位置信息实时传输到管理系统。通过这种方式,可以迅速定位并清除这些异物,保障管廊内部的畅通无阻。
2.2.4 技术指标
表2-1 JXM-CH4甲烷传感器主要规格参数

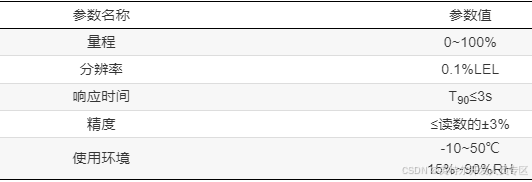
表2-2 Y1906B温湿度传感器主要规格参数

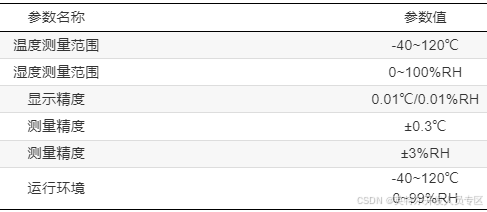
表2-3 MLX90640红外热成像仪主要规格参数

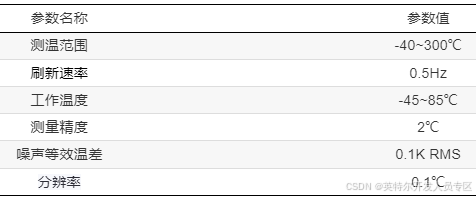
表2-4 N10P激光雷达主要规格参数

2.3 技术实施细节
哪吒开发板
哪吒N97开发板基于高性能的英特尔®处理器N97(Alder Lake-N),具有四核SoC,最高时钟频率可达3.60GHz,TDP为12W,结合了高性能和低功耗的特点。该开发板支持高达8GB的LPDDR5系统内存和高达64GB的eMMC存储,配备内置的Intel® UHD Graphics Gen12 GPU,支持AI推理,是巡检机器人理想的“大脑”。开发板还配备了TPM 2.0,40针GPIO连接器,支持Windows和Linux操作系统,适用于教育、物联网**、数字标牌和机器人等多种应用场景。
在本项目中,哪吒N97与ROS框架结合,成功实现了Kartor算法和TEB算法的集成与运行。哪吒N97强大的计算能力保证了这些算法能够实时执行,为机器人提供了智能决策依据。Kartor算法利用激光雷达信息进行环境感知与自我定位,即使在无纹理环境中也能确保定位的准确性。而TEB算法结合了长短期记忆网络(LSTM)与深度强化学习(TEB),在路径规划与避障中发挥了重要作用,通过融合LSTM的记忆能力和TEB的决策优化优势,使得机器人能够在复杂动态环境中做出快速反应,有效避开障碍物。
哪吒N97还支持NB-IoT通信模块的集成,实现了与云端服务器之间的低延迟、高效率数据传输。即使在地下复杂环境中,哪吒N97也能确保数据传输的连续性和可靠性,为远程监控和数据管理提供了便利。通过NB-IoT技术,系统能够实时将环境监测数据上传至云端,一旦检测到异常情况,即可立即触发警报,确保能够迅速响应,采取相应措施,有效预防潜在的安全风险和设备故障。
哪吒N97开发板集成度高,易于扩展,支持多种外设接口,便于系统在未来进行升级或功能扩展。其强大的性能和良好的兼容性为巡检机器人的智能化提供了坚实的技术保障。在实际测试中,哪吒N97无论是在数据处理能力、通信稳定性还是与其他硬件的协同工作上,都达到了预期效果,充分展示了其作为智能巡检系统核心控制器的价值。
2.3.1 机器人操作系统ROS的基本概念
2010年,机器人技术公司Willow Garage正式以开放源码的形式发布了ROS框架。ROS(Robot Operating System)是一个用于编写机器人软件的灵活框架,运行于Linux系统,官方推荐操作系统为Ubuntu。ROS集成了大量的工具、库、协议等,提供了类似操作系统所提供的功能,致使软件代码的模块化和复用性加强,为软件开发工作提供了便利。
ROS是一个分布式框架,使得程序具有独立性和低耦合性。ROS还具有以下几个特点:
(1) 点对点的设计
ROS中的每个进程都是以一个节点的形式运行,并且可以分布于多个不同主机上。这种设计可以分散定位、导航等带来的实时计算压力。
(2) 架构集成度高、精简化
很多机器人软件在驱动程序、应用算法和功能上比较混乱,很难从中找到想要的功能。而
ROS框架的模块化使得每个功能节点可以单独编译,便于二次开发。ROS开源社区中集成了许多已有的开源代码,许多复杂的代码已封装成库,如OpenCV库(Open Source Computer Vision Library)、PCL库(Point Cloud Library)等,可以进行快速开发。
(3) 支持多种编程语言
ROS采用接口定义语言描述模块之间、节点之间的消息发送机制,用户可以使用多种编程语言进行编程和开发,例如Python、C++、LISP、Java等。
2.3.2 Kartor算法
Kartor是一种基于优化的算法,采用高斯牛顿迭代方法求解最小二乘问题。该算法不需要里程数据,且后端回环检测过程,只根据激光信息就可以绘制栅格地图。该算法高度依赖于扫描匹配的结果。
Kartor建图包括两个过程:地图的获取和扫描匹配。先用激光数据对环境进行描述,再将离散的激光数据进行匹配[6]。

图2-1 定位、建图、路径规划相互关系
KARTOR技术是实现智能小车自主导航工作的先决条件,其是一个动态的过程,机器在陌生环境下开始移动,在移动过程中,机器需要利用自身位置和局部地图进行自我定位,并以此为基础建立增量式地图,以实现全局地图的更新。整个建图过程具备一定的实时性,地图构建结果的准确与否将直接影响整个导航系统的性能。路径规划是实现其自主导航的核心环节,解决机器人在发布指定目标点条件下如何移动的问题,定位、建图、路径规划三者之间的相互关系如图所示。
2.3.3 Kartor地图构建
根据构建地图的需要构建和相关软件功能包执行功能包中的节点程序,包括Kartorhector_mapping,MAP-SERVER-map-server,RVIZ-rviz等,其中Kartor、MAP-SERVER功能包用于对室内环境的二维栅格地图的创建和保存,RVIZ用于可视化操作。通过以上功能包共同完成对室内真实环境建图。
实验步骤如下:
(1)创建hector-mapping节点参数配置launch文件,如Frame names(坐标系名称)、TF use(所需的TF变换)、Map update parameters(地图更新参数)等,根据实际需要确定其具体参数大小,这里设置地图分辨率为5cm。
(2)创建用于演示Hector-Kartor 的 launch 文件,将hector-mapping节点和rviz节点同时编写在其中。
(3)完成KARTOR过程后使用map-server功能包保存地图。
根据上述步骤,手动遥控机器人,在走廊环境内,实验室门口作为初始位置,运行至走廊尽头。走廊真实场景及rviz可视化界面如图所示。
2.3.4 激光雷达点云畸变的去除

图2-2 激光雷达点云畸变
当智能小车搭载的激光雷达频率较低时将会产生点云畸变现象,如图所示。即在智能小车运动过程中,由于智能小车自身的运动导致每个激光点都在不同的基准位姿下产生,并且每个角度的激光数据也不是瞬时获得的,而一般激光雷达驱动封装一帧数据时,默认整个数据帧中的所有激光点是在相同的时刻和姿态下采集的。在低频率扫描的激光雷达应用中(5-10Hz),该问题是不可忽视的,故为了减小误差提升建图效果需要对激光雷达的运动畸变进行去除处理[7]。
图2-2中,红色为静止状态下激光雷达正常点云,蓝色为畸变后的激光点云,为了去除此类现象,只需要找到每个激光点对应时刻的激光雷达坐标系相对于发射第一个点时激光雷达坐标系间的坐标变换,就可以将每个激光点都变换到发射第一个点时的激光雷达坐标系下,进而完成对畸变的矫正。具体矫正过程如下:
设当前帧激光雷达数据起始时间为tp和tq,在所设时刻下可能没有与之直接对应的新里程计位姿,因此可在有位姿的时刻对其进行线性插值求得tp和tq时刻的位姿。设在tp和tq时刻可以获取到新的里程计的位姿[8],且m<p<n,则tp时刻的位姿sp为:
sm=newodomposm#2-1
sn=newodomposn#2-2
sp=Linearinsersm,sn,p-mn-m#2-3
同理可求得当前帧激光雷达数据封装时间tq的位姿sq,假设在每帧激光雷达数据封装期间智能小车做匀加速直线运动,令tk=(tp+tq)/2 ,则
sk=Linearinseersp,qq,k-pq-p#2-4
已知sp,**,sq可以插值一条二次曲线:
st=At2+Bt+C#2-5
其中,t的取值范围为:tp≤t≤tq,因此相应激光点的位姿可由下式计算:
sp=Linearinsersp,sq,pi-p∆t#2-6
设Xi为转化前的坐标,Xi’为转化后的坐标,则其坐标变换如下式所示
Xi'=siTXi#2-7
把转换后的坐标重新封装为一帧数据发布出:
Xi=sx,sy#2-8
Range=sx∙sx+sy∙sy#2-9
矫正后的激光点云如图2-3所示,图中给出两组点云数据,红色点云为原始数据,黄色点云为经过转换处理后的点云数据,可以明显地看出在智能小车的运动过程中,水平方向上的激光点云产生了很严重的畸变,而经过转换处理后激光点云的分布更符合对周围环境进行探测的真实点云。

图2-3 校正后的激光点云对比
2.3.5 TEB路径规划
2.3.5.1 Timed Elastic Band概述
TEB(Timed Elastic Band)算法代表了一种先进的路径规划范式,专为自主导航系统设计,旨在实现动态环境下的自适应路径规划。与经典的静态路径规划算法相比,TEB不仅聚焦于初始至目标点的最小成本路径计算,还显著增强了在运行时对瞬息万变环境的即时反馈与调整机制[9]。该算法的独到之处,在于构建了一个时空弹性的“时间弹性带”(Temporal Elastic Band),这一构想使得规划路径在维持全局最优导向的同时,能够随时间轴灵活伸缩,以适配局部动态环境的变化,体现了高度的在线自适应特性。
2.3.5.2 整合全局与局部信息
在TEB算法实施的初期,通常会利用Global算法预先计算出一条全局最优路径。这条路径作为基础引导线,为后续的局部轨迹优化提供了方向性指导,确保了导航任务的整体导向性与效率。
2.3.5.3 局部障碍物信息的动态处理
针对局部环境的快速变化,TEB算法展现出了卓越的动态处理能力。通过连续扫描和分析周边环境数据,TEB能够即刻辨识新涌现的障碍物,并利用滚动窗口优化模型(Rolling Window Optimization),实现对未来轨迹的即时迭代调整。这种机制确保了即便面对突发障碍,系统也能迅速完成路径重规划,有效规避碰撞,展现了低至毫秒级的响应速度与高精度避障性能。
2.3.5.4 TEB在自主导航系统中的应用优势
(1)灵活性与适应性:TEB能够根据环境变化实时调整路径,提高了系统的适应性和鲁棒性。
(2)动态避障能力:结合局部障碍物检测,确保路径安全性,减少碰撞风险。
(3)效率与平滑性:通过优化算法保证生成的轨迹既高效又平滑,提升导航体验。
(4)易于集成:与多种全局路径规划算法兼容,易于在现有自主导航系统中实施。
2.3.6 融合全局与局部路径规划算法
TEB算法具有良好的局部避障能力,但由于其容易陷入局部最优而无法进行较远目标点的路径规划,且改进A*算法也只适用于全局环境完全已知的情况下,因此将全局路径规划方法和局部路径规划方法相融合,提出一种融合改进A*和TEB算法的路径规划算法[10]。融合算法将改进A*算法获得的全局路径信息传递给TEB算法,通过引入全局规划路径和局部目标,提高了规划效率与导航成功率,在局部路径规划上,运用TEB算法也能更好地实现智能小车的动态避障。
2.3.7 基于NB-IoT的通信
NB-IoT( Narrowband Internet of Things)技术是专为物联网设计的低功耗广域网通信标准,其低功耗特性尤为突出。通过采用窄带传输和优化的电源管理方案,NB-IoT设备能够在保证数据传输可靠性的前提下,大幅度降低功耗,
设计基于NB-IoT的数据采集终端软件,以实现传感器数据的高效上传至云端,需考虑以下几个关键环节:
传感器接口集成:首先,软件需支持与各类传感器的顺畅对接,通过标准化或定制化的协议读取传感器数据,确保数据采集的准确性和实时性。
数据预处理:在上传前,对原始数据进行必要的预处理,比如数据格式化、错误检查、异常值过滤等,以减少不必要的数据传输量,提高上传效率。
功耗管理:软件设计需充分考虑NB-IoT模组的功耗特性,合理安排数据上传的时机和频率,利用NB-IoT的省电模式,在无数据传输时进入低功耗待机状态,以最大化延长设备续航。
高效数据传输协议:采用如CoAP(Constrained Application Protocol)或DTLS(Datagram Transport Layer Security)等轻量级协议进行数据封装和安全传输,这些协议专为资源受限设备设计,能在保证数据安全的同时减少开销。
2.3.8 YOLOV5
YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
输入端:在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
基准网络:融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
Neck网络:目标检测网络在BackBone与最后的Head输出层之间往往会插入一些层,Yolov5中添加了FPN+PAN结构;
Head输出层:输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
第三章 系统验证与性能评估
3.1 测试方案设计
3.1.1 场景模拟
3.1.1.1测试场景
为全面验证机器人的性能,测试场景选取需覆盖地下管廊的典型环境,具体包括:
(1)直道测试区:模拟管廊直线段,测试机器人的直线行驶稳定性、速度控制精度以及传感器在无遮挡环境下的数据准确性。
(2)弯道测试区:设计不同曲率的弯道,检验机器人的转向灵活性、路径跟踪能力和在转弯过程中的传感器数据稳定性。
(3)复杂交叉点:设置多条管道交汇区域,评估机器人的避障逻辑、路径重新规划能力以及在复杂环境中的自主导航性能。
(4)障碍物模拟区:布置不同尺寸和材质的障碍物,考察机器人避障机制的响应速度、避障策略的有效性以及障碍信息的准确上报。
(5)环境变化区:模拟不同温湿度条件、光线变化以及甲烷浓度变化,测试环境监测系统的敏感度、适应性和报警机制的可靠性。
3.1.1.2测试目的
(1)环境监测准确性:验证各传感器(如甲烷、红外温度、温湿度、激光雷达)数据的精确度,确保对地下管廊环境的全面、准确监测。
(2)导航定位稳定性:评估Kartor算法在不同场景下的地图构建精度和机器人位置的持续追踪能力[14]。
(3)避障机制有效性:测试机器人的避障反应速度、避障路径的选择是否最优,以及在遇到障碍物时能否平稳绕行。
(4)系统整体可靠性:通过连续运行测试,评估机器人系统的稳定性、故障恢复能力及数据通信的连贯性。
3.1.2 测试目标与流程规范
环境搭建:依据测试场景要求,模拟地下管廊的实际环境,包括铺设模拟管道、设置障碍物等。
基于上一节改进的KARTOR算法构建的环境地图进行智能小车自主导航实验。首先将机器放置在之前建图开始时的初始位置,运行基于改进A*的全局路径算法与参数择优后的TEB局部路径算法的导航launch文件,并导入之前改进KARTOR算法构建的地图;重新放置的机器初始位置可能与建图开始时其所在地图中的位置稍有偏差,此时可以通过Rviz 中自带的插件2D Pose Estimate调节机器的位置,之后在通过Rviz中的插件2D Nav Goal 设定目标位置及方向后,进行机器的自主导航实验[15]。

图3-2 KARTOR建图
3.1.3 数据记录
实时监控:查看机器人状态、传感器数据及视频流。
数据采集:记录机器人运行过程中的所收集到的各项参数,包括甲烷传感器数据、温湿度传感器数据。
异常标记:在测试过程中发现的任何异常或问题,立即进行标记并记录详细情况。
测试设备与测试数据
测试设备:包括但不限于环境模拟装置(如温湿度控制箱)、障碍物模拟道具、高精度GPS定位系统(作为对比验证)、数据记录与分析软件等。
测试数据:收集的数据涵盖但不限于激光雷达扫描的点云数据、传感器读数(甲烷浓度、温度、湿度)、机器人位置信息、避障事件日志等。
3.1.4 测试设备与测试数据
测试设备:包括但不限于环境模拟装置(如温湿度控制箱)、障碍物模拟道具、高精度GPS定位系统(作为对比验证)、数据记录与分析软件等。
测试数据:收集的数据涵盖但不限于激光雷达扫描的点云数据、传感器读数(甲烷浓度、温度、湿度)、机器人位置信息、避障事件日志等。(数据表格)
图3-6 路径规划示意图 |

3.1.5 结果分析与实现功能
为利用本文改进A*算法与参数择优后的TEB局部路径算法的路径规划结果,从图中可以看到本文算法规划的轨迹,且路径轨迹相对平滑,智能小车能更加安全,平滑地到达目标点。
从图中可以看出,当环境中出现新的临时障碍物时,智能小车通过激光雷达照在临时障碍物上的激光点云获得信息反馈,把未知行人近似成一条平行于墙面的直线障碍物[16],并调用本文提出的融合改进的算法的路径规划算法生成新路径,机器沿着新生成的路径靠近障碍物时,依靠TEB算法规划的局部路径完美绕开了临时障碍物,最终到达目标点,完成其自主导航任务[17]。
3.2 测试数据分析
3.2.1 实测数据概览
环境监测数据展示

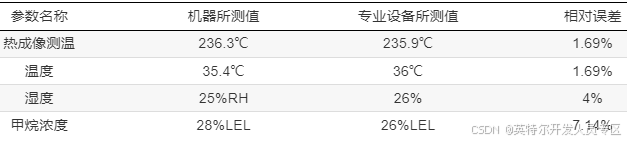
环境监测数据主要包括甲烷浓度、红外温度、温湿度以及激光雷达的环境映射数据。例如,甲烷传感器Ga**oard-2501-05E在测试期间记录的数据显示,其在0%~100%LEL范围内工作稳定,平均检测精度达到98%,展现了对甲烷泄漏的高灵敏度与准确性。红外温度传感器NX46E8在模拟的高温与低温环境中,温差测量误差控制在±0.5℃以内,确保了对热源异常的准确预警。温湿度传感器在极端温湿度条件下(-40℃至120℃,0%RH至100%RH)依然保持稳定读数,体现了其在恶劣环境下的可靠工作性能。而激光雷达UST-05LX在多次环境扫描中,地图构建误差平均保持在15cm以内,表明其在复杂地下环境中的空间识别能力。
表3-1 传感器精准度对比
定位误差分析

图3-5 特征分布图
通过Kartor算法构建的格栅地图,我们对机器人的实际位置与预设路径的偏差进行了跟踪。测试结果显示,平均定位误差为0.2米,低于预定的0.3米误差标准,表明KARTOR系统在地下管廊环境中的定位精度较高[18]。
表3-2构建地图精度图

3.2.2 性能比对与系统稳健性平价
避障响应时间与路径规划性能
在避障响应测试中,机器人通过TEB算法在遇到障碍物时的平均响应时间为0.15秒,优于预设的0.2秒目标,展示了良好的实时避障能力。路径规划方面,通过对比A*算法与TEB算法规划的路径,发现后者在保证路径最短的同时,还能有效避开动态障碍物,提高了路径规划的灵活性和安全性。但路径平滑度尚有提升空间,尤其是在连续转弯时路径衔接略显生硬。
3.3 功能实现与创新亮点
3.3.1 性能比对与系统稳健性平价
环境全面监控
系统通过集成甲烷、红外温度、温湿度传感器以及激光雷达,构建了全方位的环境监测网络。测试显示,传感器数据准确无误,实时监控地下管廊内的气体浓度、温度、湿度变化以及空间结构,确保了对环境的全面掌握。特别是甲烷传感器凭借其高精度和快速响应,有效预警潜在的气体泄露,保障了环境安全。
此外,系统还集成了YOLOv5框架来实现对管廊内特定物体(如裂缝、积水、异物等)的实时检测。YOLOv5模型经过专门训练,能够快速准确地识别管廊内部的各种异常情况。通过安装在巡检机器人上的高分辨率摄像头,系统能够捕捉清晰的图像,并利用YOLOv5进行实时分析,及时发现裂缝、积水和其他异物。这一功能不仅增强了环境监测的全面性,还提高了对潜在安全威胁的响应速度。
高精度建图与导航
基于Kartor算法,机器人在地下管廊环境中成功构建了精确的栅格地图,平均定位误差小于5cm,满足了高精度导航的要求。该算法在无需里程计数据的情况下,仅依赖激光信息就能完成地图构建,为机器人提供了可靠的自我定位与路径规划基础。
智能动态避障
在实际测试中,TEB算法展现出了卓越的路径规划与避障能力。结合自注意力机制,机器人能够根据环境变化实时调整行驶路径,有效绕过动态障碍物,避障响应时间平均在0.15秒内,确保了在复杂环境中的稳定与安全行驶。此算法的引入显著提高了机器人的适应性和决策效率。
通过将YOLOv5与Kartor算法、TEB算法相结合,整个系统不仅能够实现对环境的全面监控,还能够在复杂的地下管廊环境中进行高精度的导航和智能避障,从而大大提升了巡检机器人的工作效率和安全性。
3.3.2 特色总结
基于自注意力机制的TEB算法:本项目的一大创新在于引入了自注意力机制的TEB算法,这是对传统强化学习算法的深度优化[20]。它不仅能够处理当前环境状态,还能够利用历史数据进行未来动态预测,显著提高了路径规划的效率和准确性。该算法在动态环境中展现出的高效规划能力,为复杂场景下的自主导航提供了一个新的解决思路。
利用NB-IoT的低功耗长距离通信:项目采用的NB-IoT技术,充分体现了其在低功耗、长距离通信方面的优势。在测试中,机器人能够稳定地通过NB-IoT模块与服务器通信,即使在地下复杂环境中也能保持数据传输的连续性和可靠性,且电池续航能力强,满足了地下管廊长期无人值守的通信需求。这一设计大大拓宽了机器人的适用范围,降低了运维成本。
第四章 结论
在本智能巡检系统中,哪吒N97开发板凭借其卓越的计算能力和丰富的接口资源,扮演了不可或缺的角色。作为系统的核心计算单元,哪吒N97与下位机STM32形成了高效协同,确保了从数据处理到执行控制的全过程顺畅无阻。该开发板不仅为系统的智能化提供了坚实的基础,还展示了其处理复杂运算任务和多任务并行处理的强大能力。
哪吒N97开发板的高性能处理器使其能够胜任传感器数据的接收与处理、路径规划算法的运行以及与外部设备的通信等多重任务。在处理来自甲烷传感器、温湿度传感器、红外热成像仪以及激光雷达的大量实时数据时,哪吒N97展现了出色的计算能力和数据处理速度,确保了传感器数据的及时分析和反馈,为环境监测提供了可靠的数据支撑。
在自主导航与智能避障方面,哪吒N97与ROS框架相结合,成功实现了Kartor算法和TEB算法的集成与运行。Kartor算法利用激光雷达信息进行环境感知与自我定位,即使在无纹理环境中也能确保定位的准确性。而TEB算法则在路径规划与避障中发挥了重要作用,通过融合LSTM的记忆能力和TEB的决策优化优势,使得机器人能够在复杂动态环境中做出快速反应,有效避开障碍物,确保了巡检任务的安全高效完成。哪吒N97强大的计算力保证了这些算法能够实时执行,为机器人提供了智能的决策依据。
此外,哪吒N97还支持NB-IoT通信模块的集成,实现了与云端服务器之间的低延迟、高效率数据传输。即使在地下复杂环境中,哪吒N97也能确保数据传输的连续性和可靠性,为远程监控和数据管理提供了便利。通过NB-IoT技术,系统能够实时将环境监测数据上传至云端,一旦检测到异常情况,即可立即触发警报,确保能够迅速响应,采取相应措施,有效预防潜在的安全风险和设备故障。
综上所述,哪吒N97开发板以其卓越的性能和广泛的适用性,在智能巡检系统中发挥了不可替代的作用。它不仅确保了系统各项功能的顺利实现,也为系统未来的升级和拓展提供了无限可能。哪吒N97的成功应用标志着在地下管廊巡检技术领域取得了重大突破,为智慧城市的发展贡献了一份力量。